

중국 로봇 기술이 더 이상 실험실과 전시장에 머물지 않고, 실제 환경이라는 냉혹한 시험대 위에 올라섰다. 지난 12월 초 홍콩에서 열린 국제 로봇 대회 ‘ATEC 2025’는 화려한 데모 대신, 로봇이 현실 세계에서 과연 얼마나 스스로 판단하고 행동할 수 있는 지를 정면으로 묻는 무대였다.
이번 대회는 홍콩중문대학이 주최했으며, 중국을 비롯해 전 세계에서 모인 13개 연구팀이 참가했다. 겉보기에는 여느 로봇 경연과 다르지 않아 보였지만, 대회의 핵심 규칙 하나가 분위기를 완전히 바꿔 놓았다. 바로 ‘사람 개입 금지’, 즉 완전 자율 작동을 목표로 원격 조종은 최소화 하는 방식의 룰을 적용하였다. (원격 조작이 적고 자율적인 완료가 많을수록 점수가 높아지는 방식)
로봇은 출발 버튼이 눌린 이후부터 끝까지 스스로 주변을 인식하고 판단해야 했다. 길이 막히면 돌아가야 했고, 장애물이 나타나면 넘거나 우회해야 했다. 사람이 개입하지 않는 조건에서, 로봇은 진짜 ‘기계 노동자’로서 시험대에 오른 셈이다.
현실 환경이 만든 변수, 로봇을 흔들다
ATEC 2025의 경기장은 일부러 까다롭게 설계됐다. 평평한 바닥이나 일정한 조명이 아닌, 실외 자연환경에 가까운 조건이 주어졌다. 반사되는 햇빛, 울퉁불퉁한 지면, 바람에 흔들리는 사물들이 로봇의 센서와 인식 시스템을 끊임없이 방해했다.
특히 투명한 페트병이나 빛을 반사하는 재질은 로봇 비전 시스템에 큰 혼란을 줬다. 일부 로봇은 눈앞의 물체를 인식하지 못한 채 멈춰 서거나, 엉뚱한 방향으로 이동하며 탈락했다. 실험실에서 완벽하게 작동하던 알고리즘이 현실 환경에서는 쉽게 무너진 것이다.
이는 중국 로봇 업계가 오랫동안 직면해온 문제이기도 하다. 그동안 많은 로봇들이 공장이나 전시 부스에서는 인상적인 성능을 보여줬지만, 환경이 조금만 바뀌어도 제 성능을 발휘하지 못한다는 한계가 지적돼 왔다.
사람 없는 자율성, 진짜 실력을 가른 기준
이번 대회의 과제는 단순 이동에 그치지 않았다. 로봇은 다리와 경사로를 넘어야 했고, 현장에 놓인 도구를 활용해 임시 구조물을 만들기도 했다. 쓰레기를 인식해 분류하거나, 작은 화초에 정확히 물을 주는 작업도 포함됐다.
중요한 점은 이 모든 과정이 미리 정해진 시나리오 없이 진행됐다는 것이다. 로봇은 센서와 알고리즘 만으로 상황을 파악하고 다음 행동을 결정해야 했다. 이는 오늘날 산업 현장에서 요구되는 로봇의 모습과 정확히 맞닿아 있다.
실제 현장에서 로봇이 인간을 대신하려면, 반복 동작 뿐 아니라 예측 불가능한 상황에서도 스스로 판단할 수 있어야 한다. 이번 대회는 그런 능력을 갖춘 로봇이 아직 많지 않다는 현실을 그대로 보여줬다.

폐기물 분류 : 초기 위치에서 출발하여 바나나 껍질, 투명 플라스틱 병, 골판지 상자를 식별하고, 집어서 해당 색깔의 쓰레기통에 투입하는 과제. (로봇의 시각 인지, 목표물 인식, 이동 조작 능력, 장거리 작업 수행 능력을 검증 목적)

자율 급수 : 이 과제는 물뿌리개를 집어 물을 채우고, 꽃 바구니를 찾아 꽃에 물을 주고, 물뿌리개를 제자리에 놓는 일련의 작업으로 구성 (로봇의 공간 위치 파악 능력, 안정적인 파지 능력, 정밀한 조작 능력 검증 목적)

오리엔티어링 : 오리엔티어링(Orienteering)은 참가자들이 지도와 나침반을 이용하여 다양하고 익숙하지 않은 환경에서 빠른 속도로 이동하면서 지점 간을 탐색하는 야외 스포츠로, 금번 대회에서는 아치형 다리, 산, 가파른 계단과 같은 복잡한 야외 코스를 구성, 로봇에게 스스로 탐색하도록 함 (전반적인 계획 수립, 지형에 대한 이해, 그리고 장거리 보행 능력 검증 목적)
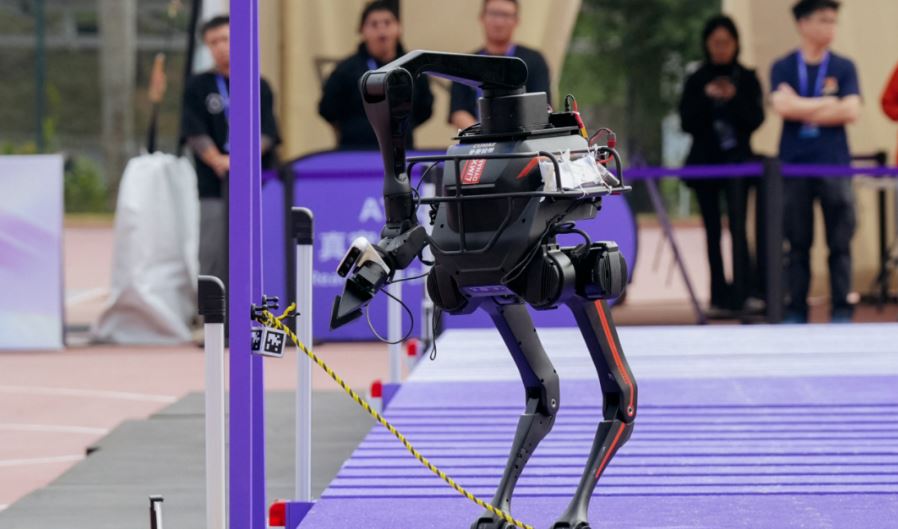
현수교 횡단 : 로봇은 서로 다른 거리를 가진 세 개의 현수교를 건넌 후, 세 번째 교량의 끊어진 부분을 통과할 수 있도록 로프를 이용해 다리를 만드는 과제 (다양한 지형을 탐색하는 능력, 도구를 활용하는 능력을 검증 목적)
중국 대학팀의 약진, 4족 로봇이 주목 받다
치열한 경쟁 끝에 우승은 저장대학 소속 연구팀에게 돌아갔다. 이들이 선보인 4족 로봇은 복잡한 장애물 구간을 거의 멈춤 없이 통과하며, 완전 자율 로봇의 가능성을 보여줬다는 평가를 받았다.
상하이 교통대학과 베이징이공대 팀도 뒤를 이으며 안정적인 자율 주행과 작업 수행 능력을 선보였다. 이들 팀의 공통점은 실제 환경을 최대한 반영한 시뮬레이션 학습과, 하드웨어와 소프트웨어를 동시에 최적화 한 점이다.
대회 현장에서는 “이번 성과는 단순한 알고리즘 경쟁이 아니라, 시스템 전체의 완성도를 겨룬 결과”라는 평가가 나왔다.

실패가 보여준 중국 로봇의 다음 과제
하지만 성공보다 더 많은 장면은 실패였다. 다리를 넘지 못해 멈춰 선 로봇, 작업 순서를 잘못 판단해 시간을 허비한 로봇도 적지 않았다. 주최 측은 이러한 실패를 숨기지 않았다. 오히려 “실패야말로 로봇이 현실에 얼마나 가까워졌는지를 보여주는 증거”라고 강조했다.
전문가들은 이번 대회를 통해 중국 로봇 기술이 이제 ‘실세계 자율성’이라는 본격적인 단계에 진입했다고 보고 있다. 아직 갈 길은 멀지만, 적어도 실험실을 벗어나 현실을 정면으로 마주하기 시작했다는 점에서 의미가 크다는 평가다.
ATEC 2025는 화려한 데모보다 불완전한 현실을 택했다. 그리고 그 선택은 중국 로봇 산업이 다음 단계로 나아가기 위한 중요한 전환점이 되고 있다.
(Robot 분야 기사 더 보기)
중국 바이트댄스, 신발끈도 묶을 수 있는 정밀한 로봇 강화학습 모델 ‘GR-RL’ 공개




